首先我们必须明白时域法是直接在时间域上对系统进行分析的方法,具有直观、准确的优点,它可以提供系统时间相应的全部信息。(该方法是最基本的方法,该方法引出的概念、方法、结论都是以后学习复域法、频域法等的基础)
控制系统的性能指标分为动态性能指标和静态性能指标。
在引入典型输入信号的原因是:控制系统的输入信号具有随机性,而如果在这个瞬态上获得系统的解析表达式,难以做到,因此希望有一些特殊的输入信号,通过这些输入信号以及其响应是一个非常不错的选择。
3.1
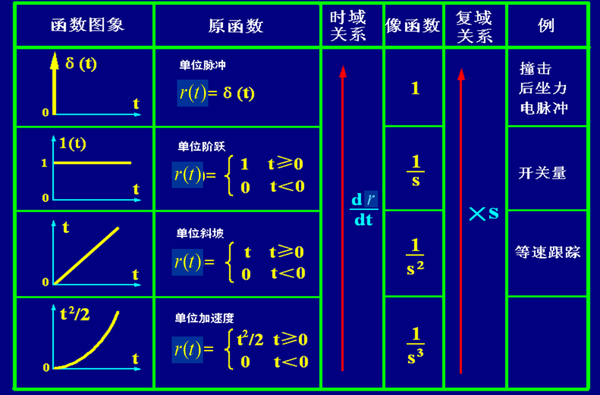
1、典型的输入信号
① 单位阶跃信号 对应的输出:单位阶跃响应
一般形式的阶跃函数:
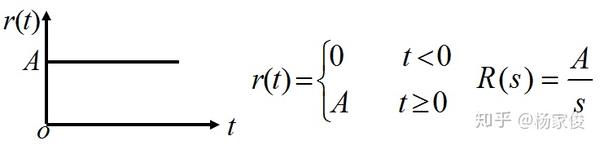
当A=1时,则为单位阶跃函数
②单位斜坡信号 对应的输出:单位斜坡响应
一般形式的斜坡函数
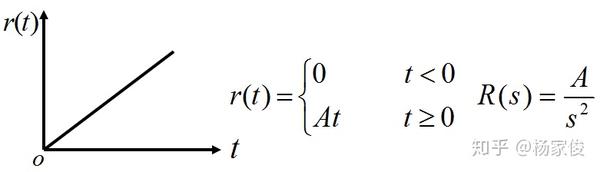
当A=1时则为单位斜坡函数
③单位脉冲信号 对应的输出:单位脉冲响应
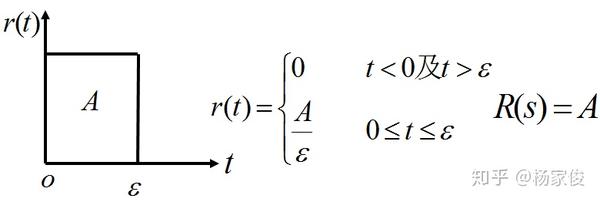
当A=1时为单位脉冲函数。
④单位加速度信号 对应的输出:单位加速度响应
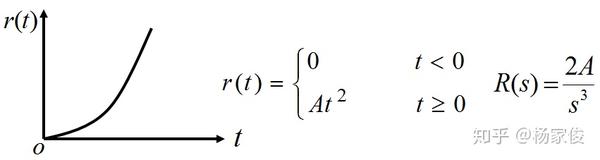
A=½时为单位抛物线函数
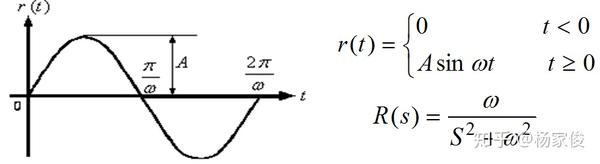
⑤正弦信号。
2、控制系统的时域性能指标
(1)响应过程分为动态过程和稳态过程
①动态过程:系统在典型信号的作用下,系统从初始状态到最终状态的过程
表现为衰减、发散和等幅振荡几种形式(系统要稳定正常工作,其动态过程必须衰减)
动态过程可以提供a、系统的稳定信息、b、响应速度c、阻尼情况
②稳态过程:系统在典型信号的作用下,时间t趋于无穷大的时候输出量的表现形式,
稳态过程提供了稳态误差的信息。
我们一般认为阶跃输入对系统而言是比较严峻的工作状态,所以如果系统在阶跃函数的作用下也能满足性能要求,那么其他情况也应该是令人满意的,因此系统的动态性能指标,均是在单位阶跃函数作用下测定计算的
并且在分析的时候,一般假定系统在阶跃信号作用前处于静止状态,而且系统输出量以及各阶导数均为零
(2)性能指标有以下:(全部都是以阶跃响应下定义)
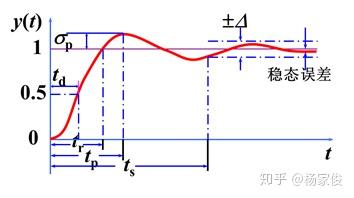
①延迟时间td:阶跃响应第一次达到终值C(∞)的50%所用的时间。
②上升时间tr:阶跃响应从终值的10%上升到终值的90%所需的时间,对有振荡的系统,也可以定义为从0到第一次到达终值所需的时间
③峰值时间tp:阶跃响应越过终值C(∞)到达第一个峰值所需的时间
④调节时间ts:阶跃响应到达并保持在终值C(∞)的±5%误差带内所需的最短时间。
有时候也用终值的±2%误差带来定义
⑤超调量σ%:峰值c(tp)超出终值c(∞)的百分比 即σ%=*100%
3.2一阶系统的时域分析
1、一阶系统的数学模型
例子:
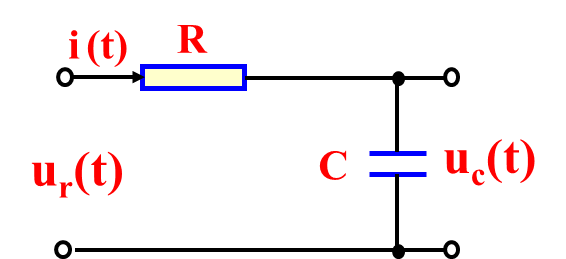
其微分方程为:T 
拉氏变换后,传递函数为 Φ(S)= 

(T的含义随系统的不同而不同)
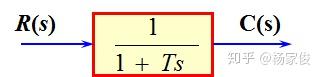
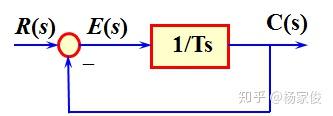
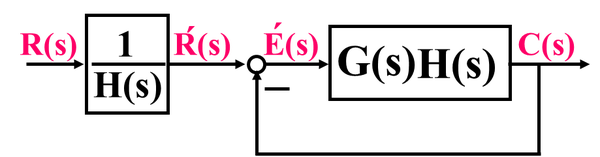
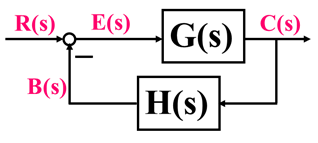
用方框图表示时有两种形式:
形式一:一阶系统
形式二:单位反馈一阶系统
2、一阶系统的单位阶跃响应
r(t)=1(t) 拉氏变换后 R(S)=1/S
因此C(S)= Φ(S)R(S)=

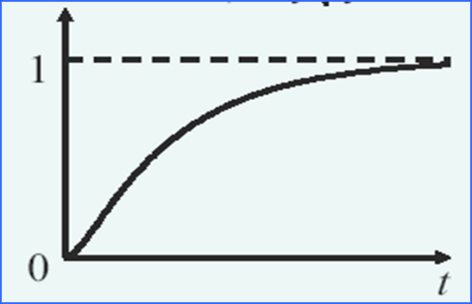
从c(t)的表达式中可以看到,初始值为0,终值为1
因此画出其响应曲线为
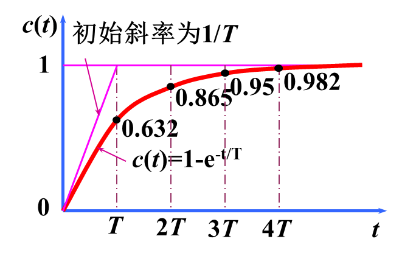
特点:
①当t等于T的整数倍时,即t=T,2T,3T,4T时候,响应的c(t)为总变化量的0.632、0.865、0.95、0.982倍,根据这个特点可以判断是否为一阶系统(这个要背背)
②t=0时候,输出相应的斜率为最大:


进过计算我们可以得到一阶系统的动态性能指标为:td=0.69T,tr=2.20T,ts=3T
峰值时间tp和超调量σ%不存在,稳态误差ess=0。
记住这个:T值的大小反映系统的惯性。T值越小,惯性就越小,响应速度就快;T值大,惯性就大,相应速度就慢。这一结论也适用于一阶系统以外的系统(因为T越小,对应的ts就越小。)
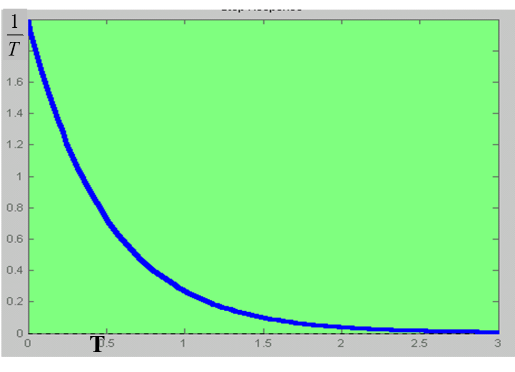
3、一阶系统的单位脉冲响应
r(t)= δ(t) , 其拉氏变换为R(S)=1
所以C(S)= Φ(S)R(S)=
其斜率公式

调节时间按衰减到终值的5%求取 Ts=3T(T越小,响应速度越好)
注:理想脉冲函数无法得到,因此往往以脉宽为b、幅值有限的脉动函数代替理想单的脉动函数δ(t),而且要求脉宽b<0.1T。
4、一阶系统的单位斜坡响应
r(t)=t, 其拉氏变换 R(S)= 
C(S)= Φ(S)R(S)=
其中 t-T为稳态分量:其与斜坡输入函数的斜率相同,但在时间上之后一个T,因此存在位置误差,
T
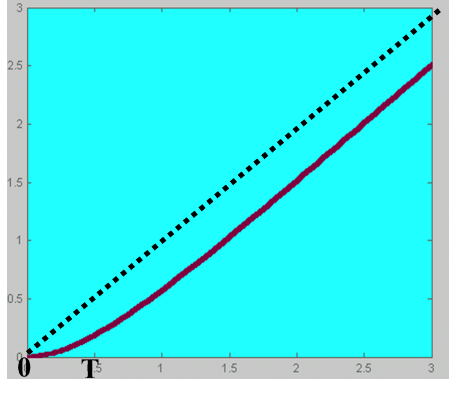
特点:
①系统的输出量和输入量之间的位置误差随时间推移逐渐增大,但最后趋向于T。因此,T越小,位置误差越小。
②在t=0时,初始实线的斜率为0 (
因此初始状态的输出速度(实线斜率)和输入速度(虚线斜率)之间误差最大
5、一阶系统的单位加速度响应
r(t)= 

因此C(S)= Φ(S)R(S)=
跟踪误差e(t)=r(t)-c(t)=
当t趋向于∞时,e(t)趋于无穷大,因此得出一阶系统无法跟踪加速度信号
3.3二阶系统的时域分析
用二阶微分方程描述的系统称为二阶系统,其应用广泛,甚至许多高阶系统在一定条件下可以用二阶系统表示。
- 二阶系统的数学模型
书本上一开始就来了一个RLC电路,推导出一个二阶系统的模型,
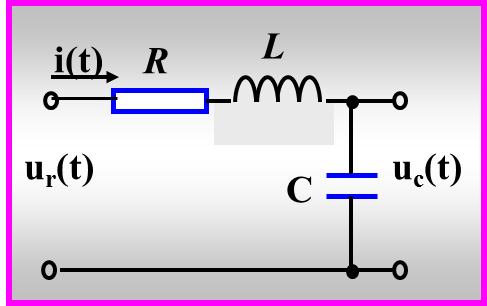
其微分方程为 LC
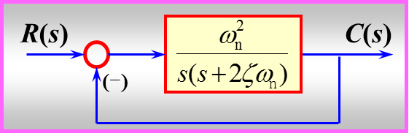
所以其传递函数为 Φ(S)= 
我们对这个传递函数标准化(标准化后,参数有具体意义),就可以得到
Φ(S)=
其中wn= 


其开环传递函数为 G(S)= 
令闭环传递函数的分母多项式为0,其闭环系统的特征方程 


得出其根(闭环极点)为 

通过分析不同的ζ情况,得出不同的特征根状况
①欠阻尼:0<ζ<1 S1,2=-ζ
②无阻尼:ζ=0 S1,2=±j
③临界阻尼:ζ=1 S1,2=-
④过阻尼:ζ>1 S1,2=-ζ
2、二阶系统的单位阶跃响应
r(t)=1 R(S)=
(1)欠阻尼 (0<ζ<1)
S1,2==-ζ 

(其中令
所以输出C(S)= Φ(S)R(S)=
=


拉氏反变换为 :
c(t)=1- 


=1- 
式中β=arctg 
(记忆方法:cosβ=ζ,sinβ=
从c(t)的式子看,发现其由稳态和瞬态两部分组成,稳态部分等于1,表明不存在稳态误差(1-r(t)=0),瞬态部分是阻尼振荡,阻尼的大小由ζ
(2)无阻尼(ζ=0)
C(t)=[1- 
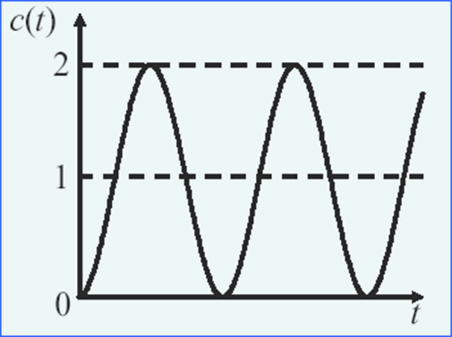
响应曲线:此时为等幅振荡
(3)临界阻尼(ζ=1)
C(t)=[1- 

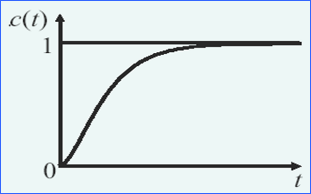
响应曲线:单调上升,无振荡,无超调,无稳态误差
(4)过阻尼(ζ>1)
C(S)= 
因此对其作拉氏反变换
c(t)=1- 

=1+ 

T1、T2成为过阻尼二阶系统的时间常数,而且T1>T2
如果ζ>>1时,可以把-1/T2指数项的分量忽略,这样过阻尼的相应类似于一阶系统的相应
响应曲线:单调上升,无振荡,过渡过程时间长,无稳态误差。
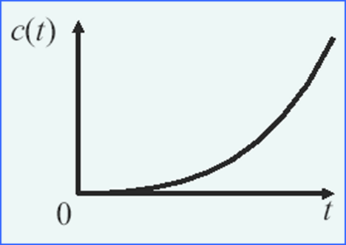
(5)负阻尼(ζ<0)
其有一对共轭复根,且极点实部大于零
响应有两种状态,一种是振荡发散,一种是单调发散
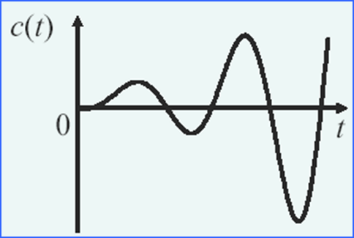
由于系统此时不能正常工作,那么研究也就没有意义了。
小结:阻尼比决定了系统的振荡特性
- ζ<0 时(负阻尼),响应发散,系统不稳定;
- ζ=0时(无阻尼),等幅振荡
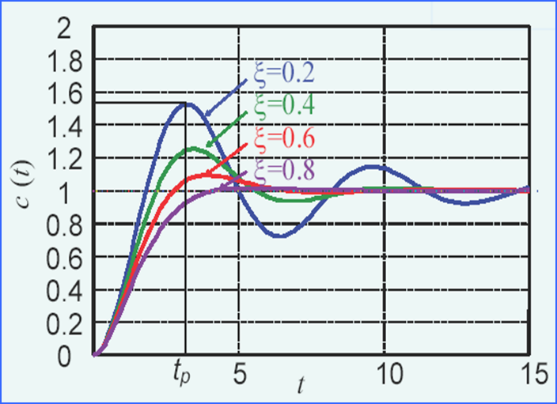
- 0<ζ<1时(欠阻尼),有振荡,ζ越小,振荡越严重,但响应越快
- ζ≥1时(过阻尼和临界阻尼),无振荡,无超调
除不允许产生振荡的系统,通常采用欠阻尼状态,阻尼比选择在0.4~0.8之间,保证系统有好的运动动态。(此时响应曲线超调量合适,调节时间短)
还必须注意,ζ<0.4时,会使超调量较大,ζ>0.8时,又会使响应迟缓
(这里判断的时候,紧紧记住那个好多ζ的图就好)
ζ一定时,ωn越大,瞬态分量衰减越快,系统能更快达到稳态值,系统的快速性越好
(这是因为wn在指数部分且带一个负号,所以其越大,衰减越快)
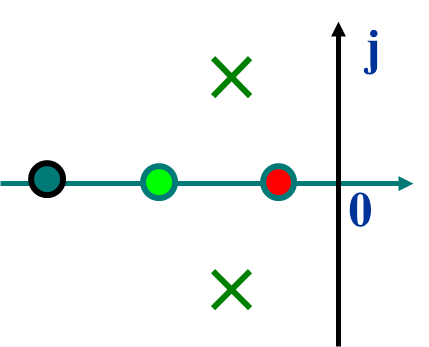
3、欠阻尼二阶系统的动态过程分析
回忆一下动态指标:tr、 tp 、σp%、ts 。
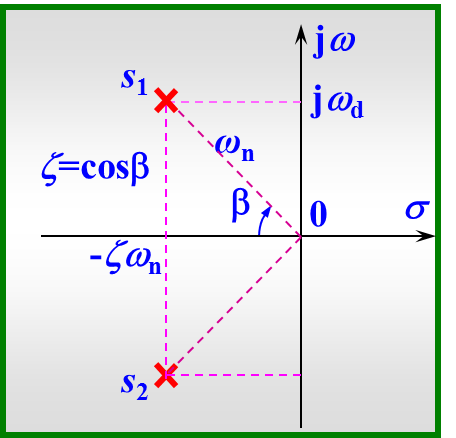
图中 衰减系数σ指闭环极点到虚轴之间的距离,阻尼振荡频率为闭环极点到实轴的距离,自然频率是闭环极点到原坐标之间的距离,与负实轴的余弦是阻尼比,即ζ=cosβ
(1)上升时间
根据定义,令c(t)=1,得
解得
上升时间为 


从式中可以看出,当ζ一定时,β不变,系统的相应速度和wn成正比
当阻尼振荡频率wd一定时,ζ越小,上升时间越短
(2)峰值时间
对c(t)求导 
所以得
所以,
tp= 

式子说明峰值时间等于阻尼振荡周期的一半,ζ一定时,wn越大,tp越小
(3)超调量σ%:
最大超调量发生在峰值时间tp时,把其带入c(tp),得到c(tp)= 1- 
因为sin(π+β)=- 
又由于终值为1,所以得
最大超调量百分比 σ%=
ζ越大,从而β越小,所以cotβ越大,所以超调量越小,
当ζ在0.4-0.8范围内时,σ%在1.5%~25.4%之间
- 调整时间ts :回忆一下, 单位阶跃响应进入±△误差带的最小时间
ts= 
小结:
- 二阶系统的动态性能由
- 增加ζ:a、降低振荡(即ts减小),减少超调量 b、系统的快速性能降低,tr、tp增加。
- ζ一定,wn越大,系统响应快速性越好,tr、tp、ts越小
- 超调量仅与ζ有关,而tr、tp、ts与ζ、wn有关
4、二阶系统的性能改善
(1)比例—微分控制
其结构图:Td为微分时间常数,比例因子是1,E(s)为误差信号
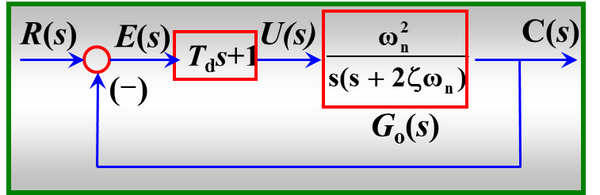
开环传递函数:G(S)= 



闭环传递函数: Φ(S)= 


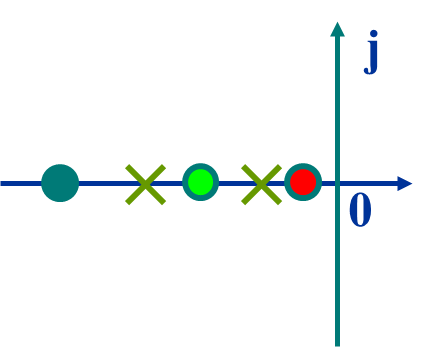
增加一个闭环零点 -z=-1/ 


特点:
①引入比例-微分控制,阻尼比增加,从而抑制振荡,使超调减弱,改善系统平稳性;
②闭环零点的出现,既加快系统响应速度,使上升时间缩短,峰值提前,又削弱了"阻尼"作用。适当选择微分时间常数Td,使系统既有较好的平稳性,又在出现较小超调情况下,提高快速性。
③不影响系统误差,自然频率不变
单位阶跃信号作用下的输出响应
C(S)= Φ(S)R(S)= 

其输出相应为 c(t)=1+r 

r=
φ=-π+arctan[wn
部分性能指标:
峰值时间tp:对c(t)求导,令其为0,
得tp= 
超调量σ%:σ%=r*
调节时间ts: 
(2)测速反馈控制
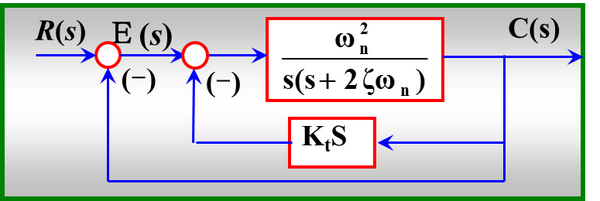
开环传递函数:G(S)=
![\frac{K}{s[s/(2ζw_{n}+K_{t}w_{n}^2)+1]}](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_ssjdUNKXbQeZ6RnslfBvSdIHai9g5SBBAjD3Qp4ULHuhzyai-ERJeVx9i9Z9TFhdjBvigdD5EJHVl_OYymKAVZ_an1Qu67QsA3yu1JS4WyCfc5KU6Rj2augvW1XhCdmNe36-0uQTnd6b6qaEmlPYHkvGdTYCf_l8PKrgZ4tep6EtwAjNU1Pb7OrSmU8hxPZ-0=s0-d)
其中K= 
闭环传递函数:Φ(S)= =

两种控制系统比较如下:
(1)开环增益K,比例—微分控制不改变开环增益K 。
(2)wn不变,阻尼比增大。分别为
ζt=ζ+ 
(3)比例—微分控制提供一个实零点,在相同的阻尼比时,超调量大于测速反馈控制。
(4)比例—微分控制对输入噪声有放大作用,输入端高频噪音严重时,不宜选用此方法。测速反馈控制无需设置放大器,适合任何输出可测的控制系统。
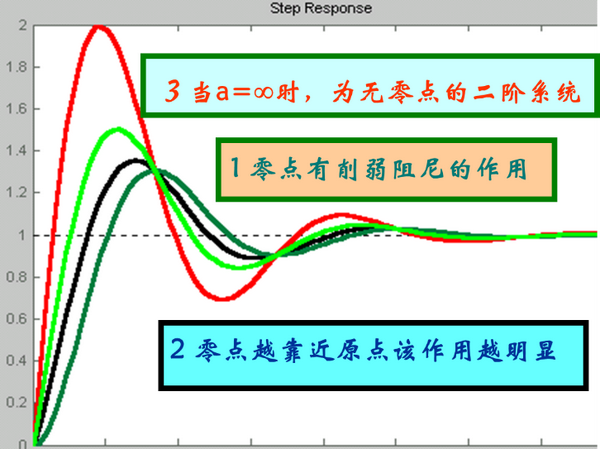
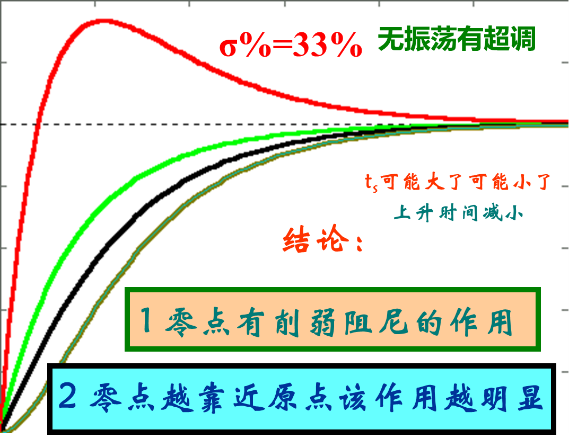
5、附加零点对欠阻尼二阶系统的影响
附加一个闭环零点,超调量上升,上升时间下降,峰值时间下降。
附加零点对过阻尼二阶系统的影响
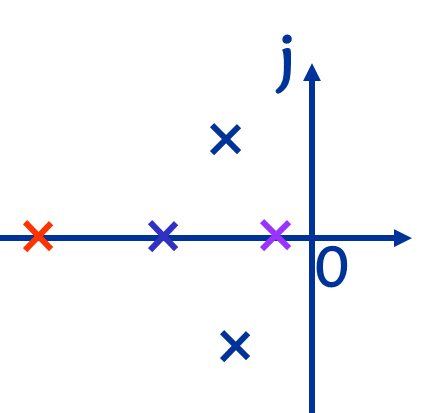
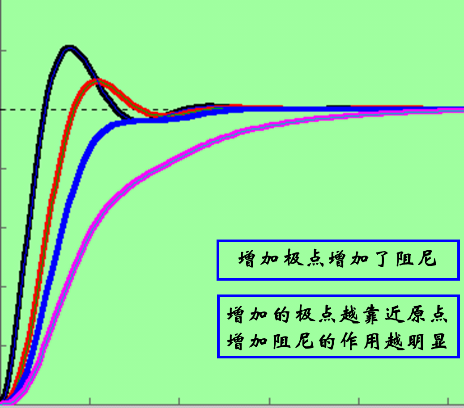
附加极点对系统的影响
对所有的二阶系统,增加零点,削弱阻尼,超调变大,上升时间变短,调节时间不一定小。
3.4线性系统的稳定性分析
1、系统稳定的条件:系统初始条件为0时,受到δ(t)的作用,输出c(t)为单位脉冲响应,这相当于系统在扰动的作用下,输出信号偏离平衡点的问题,当t→∞时,
若=0-------------------系统稳定
若=∞------------------系统不稳定
若=A(A为非零常数)---临界稳定
(t≥0)
系统稳定的充分必要条件:系统特征方程的根全部具有负实部,即闭环系统的极点全部在s平面左半部。
注:稳定性与零点无关
- 劳思稳定判据
其特点是要知道系统的闭环传递函数,其线性系统的闭环特征方程为

用例子去说明,
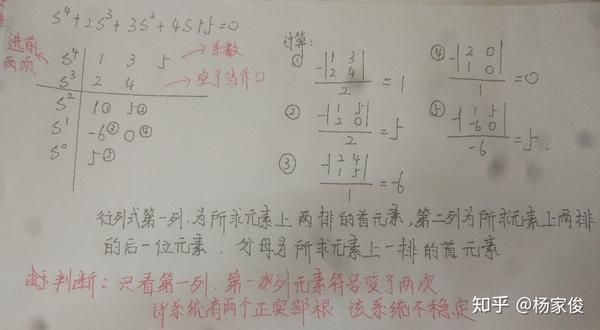
讨论特殊情况一,因为第一列元素会作为分母,当第一列出现0时,要用一未知量代替
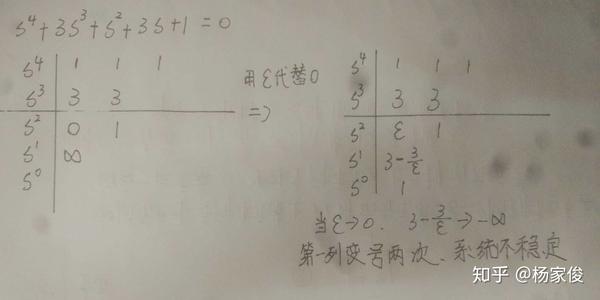
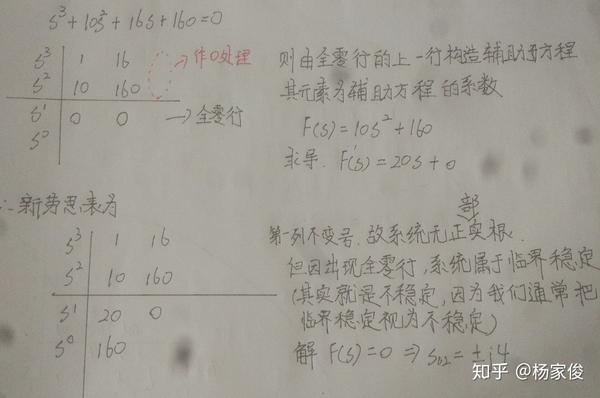
特殊情况二,出现全行都是0
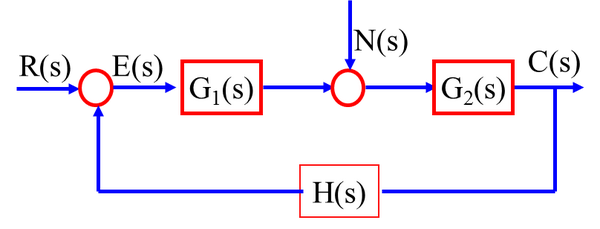
3.5 线性系统的稳态误差
1、误差的基本概念
系统的误差通常用两种方法定义:
(1)按输入端定义:
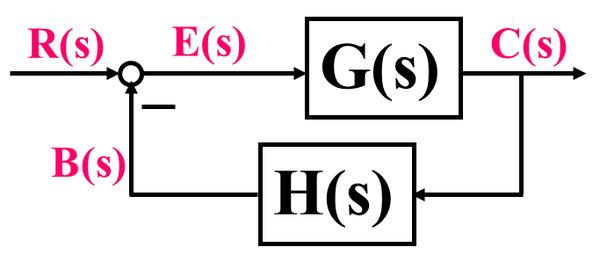
E(s)=R(s)-B(s)=R(s)-C(s)H(s)
(2)按输出端定义
E'(S)=R(S)/H(S)-C(S)
按输入端定义的误差E(S)通常在实际系统中可以测量,具有一定的物理意义,但误差理论的含义部十分明显,按系统输出端定义误差是希望输出与实际输出C(s)之差,比较接近误差的理论意义。但通常不可测量
两种误差定义之间的关系是:E'(S)=E(s)/H(s)
2、计算误差的一般方法
最常用的就是终值定理法,该方法适合各种情况下的稳态误差计算,以下说明步骤
①判定系统的稳定性:稳定是系统正常工作的前提条件,否则稳态误差没有意义
②求误差传递函数:Φe= 

误差信号e(t)是E(S)的拉氏反变换 ,其由瞬态分量 ett(t)和稳态分量ess(t)两部分组成
由于系统必须稳定,所以t→∞时,ett(t)=0,所以稳态误差就是ess(t)
用终值定理求稳态误差:ess= 
终值定理应用条件是sE(s)在右半平面及虚轴上解析,即sE(s)几点全部为s平 面左半平面。当系统不稳定或者R(S)的几点由于虚轴上以及虚轴右边时,该条件不满足
这个系统的稳态误差ess= 

3、系统型别
设开环传递函数G(s)H(s)= 
式中K为开环增益,和为时间常数,v为开环积分环节的数目,称为系统的型别或无差
度。按v的不同,系统分类如下:
V=0,称为0型系统,或有差系统
V=1,称为Ⅰ型系统,或一阶无差系统
V=2,称为Ⅱ型系统,或二阶无差系统
V>2,除复合控制外,系统难以稳定,在此不做讨论
令=,则当s→0时,有→1
因此G(s)H(s)= 
所以Φe= 

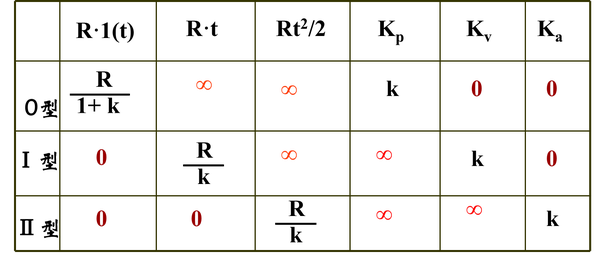
4、静态误差系数
①阶跃输入 r(t)=A*1(t),则R(S)=A/S,A是阶跃函数的幅值。
所以ess= 

定义:静态位置误差系数:Kp== 

(根据系统型别那部分内容去理解)
因此:

因此,要为0,则用I型以上系统,0型系统在阶跃输入下存在非零的稳态误差
②斜坡输入 r(t)=At,A为斜坡输入函数的斜率
ess= 

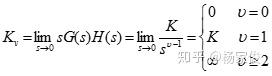
定义:静态速度误差系数: 

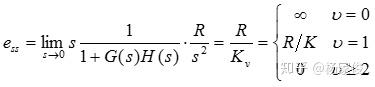
因此选Ⅱ型以上系统不存在稳态误差,选用Ⅰ型系统存在有限误差,表明稳态输出时的速度和输入速度相同(因为是相减),0型系统不能跟踪斜坡输入
③加速度输入 r(t)=A 
ess= 

定义静态加速度误差系数 


假设系统的输入信号是多种典型函数的组合,例如r(t)=(A+Bt+C)*1(t)那么可根据线性叠加原理求解稳态误差,ess= 


小结
从中我们可以看到,增大K,那么就减小,如果增加开环传递函数中的积分环节,那么就可以消除稳态误差(例如在对于Ⅰ型系统,输入斜坡信号会有误差,但是增加积分环节,使其提升到Ⅱ级系统以上,那么就误差就为0)
6、扰动作用下的误差
essn= 

当| 

大家可以评论相关自动控制的问题,我也会耐心给你们解答的(#^.^#)
以上内容未经本人同意禁止转载~~
来源:知乎 www.zhihu.com
作者:杨家俊
【知乎日报】千万用户的选择,做朋友圈里的新鲜事分享大牛。 点击下载