本学期参加了一个共形场论的研讨班,为了变成一个合格的名词党所以做一些相关的读书笔记。本文主要介绍了微分流形以及度规张量的概念,以及举了一些常见的例子,用以为后续的讨论的共形场论提供数学基础。本系列主要参考Paul Ginsparg的应用共形场论教材[1],本文还参考了梁灿彬的广相教材[2]。
我们先复习微分流形的概念。直观上,我们研究一个光滑的空间,其任意小邻域都和欧氏空间类似。数学上,一个 

- 其是Hausdorff空间,即任意两点可被它们的邻域分离;
- 存在
维局部坐标邻域(在拓扑上是开集),即对任意给定流形上的点
,存在其的一个邻域
和一个映射
(这里
是
上的一个开集),使得
是同胚(连续双射且反函数连续),另外有序对族
被称为该流形的图册(atlas),
被称为索引;
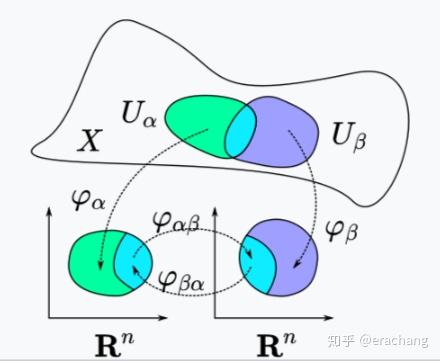
- 其图册的转移映射(transition map)是光滑的,如图所示,
和
是两个有重叠部分的开集,它们分别同胚于
(或其逆映射
)叫转移映射。
最简单的微分流形就是 

然而基于更高维平直空间嵌入的定义方式并不是最好的定义切空间的方式。为了定义流形上的切空间,我们先观察 

【切空间】称是流形
上的一个
函数,若对于每组
都有
是光滑的。对于
,称映射
为
。如果再者我们定义导数的加法和数乘满足线性,即
,我们则有一个由所有导数组成的线性空间
,称
对于一个光滑流形 






为了研究微分流形的距离结构,我们需要研究其线元素(或称第一基本形)。直观的理解是流形上一点附近的一段微小的长度(的平方),即欧几里得平面上的 




我们的动机是需要构造形如 


【度规张量】。
,将两个切向量映到实数,且满足:
1. 双线性,即等;
2. 对称性,;
3. 非退化性,。
另外我们还要求是光滑变化的,即对于给定邻域内的光滑向量场
和
,
关于
注意到有限维线性空间上的双线性映射都可以由矩阵描述,故度规也可以由矩阵给出表述。
为了方便我们先引入简化记号,这里上标不是指数而是标号。
现在假设我们在切空间上有一组基 

![g_{ij}[\mathbf e]=g(e_i,e_j)](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_sSztyo8X8G9qXQ9Phu5kaoHcaIfkI92sv7F0VT6TvyNcrfXSfxycjaItfoQ-se1GYN6VWjonZcxKpw9r6-lF8WVavbnPIeV2tFhXZCxy8GeFy8-aoWGowTVkIIqx-S_RrPXhf9Punb1c0FMthO=s0-d)
![G[\mathbf e]](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_smUQANDVbWF2XllJ2K5kY0JBtKqd5CS8WIOGuzvmM-9MzncW7r5O2XvTw1l9j1hrpSOCMfgQpyELEZq7o7zzbT6fRjN0Egh4QiLERiUOgTJ_BAdb5SXQ=s0-d)



![g(v,w)=v^iw^jg_{ij}[\mathbf e]](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_tBkhkwu60Exm_rKtcdS9TGrMiGfg2FsBrLIXdZz89izQk8jiGLSm3pX6xDjSR7x07bmpV7hcOA_upnFw6MykgHrDPU80LgBGVC-b3zJIqRAVJn1WVIn1_AjIgvp67KszkVtRU0xi-B7okL_vkBK7dDRS7Q=s0-d)


![G[\mathbf e A]=A^\top G[\mathbf e]A](https://lh3.googleusercontent.com/blogger_img_proxy/AEn0k_ujTEHa_IHsGONyT_YhXjFleoS4wQMtsc0NBL_0IR4U9jIkKy_5ws-_HRU4pK0ODyTVfuECyLxdge8EIPkIlp96oe8ixZOb900xudenE4w0c_AK1HlU5E--4X5T1NM-CsvgDpnkpmUu8QY2--WEDDwKPIvDnCkMAzvl=s0-d)





度规具有矩阵结构这个性质可以很方便地让我们研究其上的各种性质,对称性允许我们对其求特征值,非退化性保证了特征值不为0,进而定义度规的符号(signature):
【符号】(满秩)矩阵的符号为一个二元组,分别代表其正负特征值的个数。
注意到符号具有旋转不变性,即不取决于基的选择,故可以定义度规(在一点处)的符号数。另外度规的符号实际上是某种广义对流形的衡量:
若
对于单连通的微分流形,若 




现在线元素(line element)或者其平方第一基本形(first fundamental form)可以被定义为:
。
我们总是可以对度规张量求特征值,使得第一基本形不包含交叉项,即若 




直观上理解假如我们将基底正交化为 


下面我们来讨论一些例子:
- 二维欧几里德流形。在笛卡尔坐标系下其度规为单位矩阵,对应的线元素为
。若我们把坐标变换成极坐标系,度规
其中
是雅可比矩阵,即
。
- 四维洛伦兹流形。线元素是
,其中
是光速,其有三个类空维度和一个类时维度。若将它转换成球面坐标我们有
其中
,后者是
中球坐标变换公式
然后对其求雅可比矩阵
,则
,我们用Mathematica辅助计算易得结果
。最后需要把空间限制在单位球面上,即对
做积分得
。
JacobianMatrix[f_List?VectorQ, x_List] := Outer[D, f, x] /; Equal @@ (Dimensions /@ {f, x})(*define Jacobian matrix*) cartesian = {r*Sin[t] Cos[p], r*Sin[t] Sin[p], r*Cos[t]}; sphere = {r, t, p}; J = JacobianMatrix[cartesian, sphere]; FullSimplify[MatrixForm[Transpose[J].J]] - 我们有3维得欧几里德空间得(平直)度量,用极坐标表示为
。对于
,我们将其嵌入
并考虑其坐标
,其中后三个分量是一个三维球坐标,描述了子空间
是该四维向量的长度,则坐标变换如上述的球坐标以及第四个分量
,然后把它们缩放
,最后对delta函数
做积分我们有度量
。类似地我们考虑三维马鞍面
,将其嵌入伪欧几里得空间
,类似地考虑变量代换
:
并计算其度量
,对
。我们发现它们可以统一到一个框架下:
其中
。这就是宇宙学上FRW度规(Friedmann-Robertson-Walker metric)的一个组成部分,完整的FRW度规需加上时间维
以及宇宙标度因子
:


参考文献:
[1]: Ginsparg, Paul. "Applied conformal field theory."arXiv preprint hep-th/9108028(1988).
[2]: 梁灿彬, 周彬. 微分几何入门与广义相对论. 科学出版社, 2006.
来源:知乎 www.zhihu.com
作者:erachang
【知乎日报】千万用户的选择,做朋友圈里的新鲜事分享大牛。 点击下载
没有评论:
发表评论