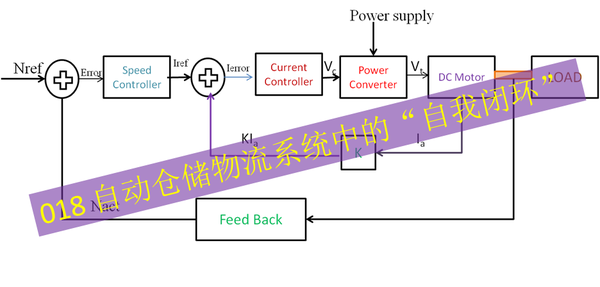
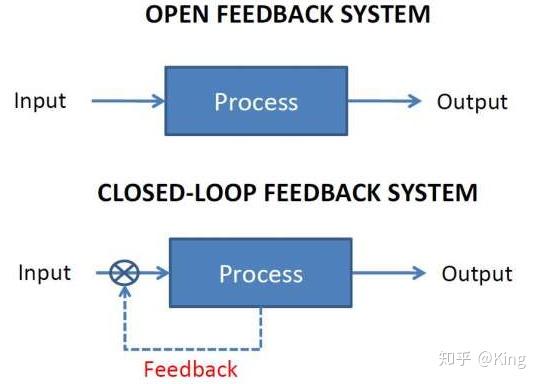
最近关注到一个词"闭环系统",是现代工业控制系统理论里的一个很重要的理论基础,从百度科普看到如下:
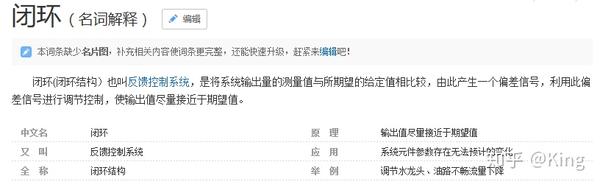
举例:调节水龙头——首先在大脑中对水流有一个期望的流量,水龙头打开后由眼睛观察现有的流量大小与期望值进行比较,并不断的用手进行调节形成一个反馈闭环控制;骑自行车——同理,不断的修正行进的方向与速度形成闭环控制。
上边的举例其实非常形象的说明了什么叫做闭环系统,简单并且笼统一点的说,为一个目标作出某项动作后不断检测实际情况并不断调整执行这项动作,直至达到最后的目标。
对于仓储物流自动化系统,本身就是工业自动化的其中一种应用场景,不管从系统的宏观角度还是单个机构,都处处围绕着闭环的思路来发生的。
- 自动化仓储物流工程项目实现过程
任何一个行业的工程项目建设都是一个很复杂的过程,从项目立项到最后完成并投入运行,期间必然有大量的人力物力财力各个方面的资源投入,伴随着各种资源的投入和建设,工程项目逐步的完成到直至达成最后的预期效果。上边描述的过程中,目标就是工程项目的最终完工和投产运行,期间不断的建设和资源投入就是为了达成最终的项目而做出的执行动作,同时过程中不断修正的项目管理过程和实施过程中的修修改改就是不断调整的反馈过程,不得不说,工程项目建设就是个闭环系统的过程。

对于自动化仓储物流项目而言,也是一样的。比方说,建立一个自动化仓储项目:
欲建成:
-5台堆垛机和高位货架组成的立体库
-6台AGV完成立体仓库到月台的托盘搬运作业
-立体仓库建成4000个货位
-平均每小时进出库量200个托盘
-月台到仓库之间的AGV搬运完成每小时峰值300托盘
-设备和信息全自动化管理
-合同签订后5月内完成项目
-其他等等条款

而在项目实际执行过程中,发现有很多方面需要对项目进行重新修订,比如由于公司业务量的增加,需要将货位数增加,根据这一实际情况,需要重新对工程进行调整:修订合同,下单采购更多的货架,对仓库的地面区域更大范围的基建工作,与堆垛机厂家进行沟通和设计调整……,使后增加的货架也能被堆垛机进行自动出入库作业和信息化管理。
再比如,在建设过程中,发现AGV的数量难以完成初期规划的每小时峰值的300个托盘的吞吐量,此时需要对AGV的数量和工作路径重新规划,需要AGV工程技术人员进行大量的调整工作,直至最后能满足效率的要求。
……
再比如,交工验收期为合同签订后5月,系统集成商在进行到3个多的时候发现进度比预计有落后,在综合评估后,会调入更多的工程技术人员投入项目中,使当前的工程建设进度加快,能按时的履行合同中的交货期约定。
所有的自动化仓储物流项目肯定是在伴随着一些更改和调整的发生,最后达到最终想要的工程成果,这种围绕着最终的目标而不停的修正和实施过程,正是闭环系统最典型的应用。
- 自动化物流设备单元
仓储物流中心里,不管是那种设备,最终的目的都是按照需求进行物料的搬运和存放,在任何一个仓储中心,物料都会被存在合适的位置上,不管是经过自动设备或者是非自动设备。
-叉车
无论在普通仓库还是在工厂,最常见的物料搬运设备要数人工叉车了。对于人工叉车的作业过程是否伴随着闭环系统呢,我们来分析一下。

首先看一下人工叉车作业的目标:
将物料从A点搬运到货架上的B点,完成入库。
执行过程:
叉车司机将叉车开到A点,再用叉车将位于A点的物料托盘挑起来后,驾驶叉车开到位于货架区的B点,找到正确位置后,将物料托盘通过叉车放到位于3层的货架上。
反馈修正过程:
这个过程中由地球上最先进的"人肉智能"完成实现。操作员通过肉眼判断当前的叉车进行的路线是否接近A点或者B点,从而去判断操作叉车是继续前进还是后退,亦或是加速还是减速 。到达A点后,操作员通过观察叉车货叉与托盘的位置关系,不断的调整货叉的位置,直到正确的位置后,驾驶叉车挑起托盘并开到货架区的B点。再次,驾驶员通过观察货叉与货架的位置关系,提升叉车的门架到3层可以放托盘的正确位置处,不断调整叉车位置,直至可以将托盘完成的放置于3层货架上位置。
以上的整个过程伴随着人工的动态调整叉车的操作来最后完成物料托盘从A点到B点搬运,通过人肉智能完成这个搬运的闭环操作。
-输送机
输送机是自动化仓储系统里非常常见的一种搬运设备,输送机通过电气控制来完成自身的闭环系统。

输送机的目标:
从下游接收托盘,并通过输送机机构如皮带,链条或者辊道等输送到下游单元
执行过程:
电气控制柜发送启动信号给输送机电机,电机转动带动输送机上的物料单元向前移动,达到搬运目的
反馈修正:
输送机在接收下游的物料单元时,系统会检测下游的物料是否到达输送机的输入口附近,到达时才启动电机接收物料,同样在向下游输送物料时,会检测物料是否已经到达本段输送机的末端,如果下游输送机不能接受物料,控制系统要调整电机做出停止的动作,如果下游输送及可以接收当前物料,控制系统继续控制电机转动。
输送机的反馈闭环系统一般是通过位于输送机身上的光电传感器和控制系统来完成的。没有闭环的控制系统可能会发生物料单元与前后设备无法衔接的情况,如果物料如果是是成吨以上的重载单元,没有闭环系统,输送机一位的执行输送可能会发生载重碰撞或直接落地的危险。
-AGV智能搬运
AGV小车简单的来说,可以认为是无人驾驶的叉车,通过AGV小车身上的各种传感器感知周边环境和当前所处的位置,自我调度到正确的起始位置进行物料捡去后在运行到放货位置处完成物料卸货。

AGV的目标:
AGV自动运行到A起点并叉取物料单元,自动运行到正确的目标位置后,将物料单元卸载到存放位置B点。
执行过程:
AGV本体控制自己的运行电机和转向机构动作行走到正确的A点位置或者B点位置,到起始点或终点时控制自身的货叉起升或者下降完成物料的上货和卸载。
反馈修正:
AGV通过激光扫描仪或者编码器等各种传感器实时记录当前运行的位置并不断的比对与目的地址的位置关系,通过调整AGV的驱动单元和转向单元逐步的驱使车体不断的靠近目的地址,从车体的表现上来看就是前进后退或者加速减速,左转右转等等一系列动作,整个连贯的动作过程中,AGV的控制系统一直在不停的扫描位置和位置偏差,不停的修正车身的方向和位置。
AGV的闭环系统是依靠导航技术、定位技术、驱动技术,电子地图等一系列综合的技术来完成的。通过不停的输送动作和比对修正,AGV最终可以完成物料单元的A点到B点的搬运。
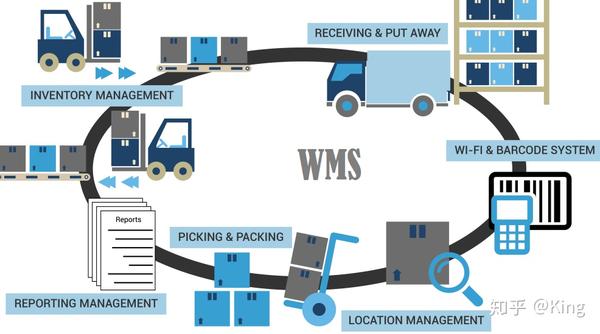
-仓储管理软件WMS
完整的全自动化的仓储物流系统一定少不了WMS的加持,WMS可以实时记录当前的库存和物料信息,可以记录进出库流水和各类出入库订单。一个完善的高度自动化仓储系统,WMS里的所有工作都可以无人化完成。WMS对库存的管理也伴随着一个宏观的闭环在发生。
WMS的目标:
最基本的要完成每个货位的物料存储信息
执行过程:
入库时要通过入库订单输入记录当前入库的每笔物料,可以是人工录入,可以是扫描录入,也可能是与上层企业ERP信息对接后自动完成。
反馈修正:
入库后的物料必定会出库,出库时系统要再次经过WMS合适出库订单,如果发现出库的物料与入库时的信息不符,需要人工进行排查并更新库存数据库。同时库管员要定期通过WMS里盘库的功能,对库内的物料进行抽查或者整库盘点,直至物理库存与数据库存完全保持一致。
WMS的闭环控制是通过进出库管理流程上的逻辑互检来动态调整库存数字化的正确性,通过物理上和数字上的比对来调整物料数据库实现100%的准确率。
来源:知乎 www.zhihu.com
作者:King
【知乎日报】千万用户的选择,做朋友圈里的新鲜事分享大牛。 点击下载
没有评论:
发表评论