
之前听过清华FEM的Mooc前九章,知道了FEM的最基本的概念,介绍了FEM的流程,简单的单元研究,但实际上开始用ABAQUS操作以后,发现在ABAQUS中,常常采用的单元,比C3D20R这种三维二阶减缩积分单元,分析结果是摸不清楚的,看了庄茁老师讲的实体单元,有了一些头绪,大致懂了什么叫剪切自锁,什么叫沙漏,但也并没有给出一些更具体的数学表达,于是回头看看曾老师讲的第十和十一章,有关数值问题的精度和高阶单元的介绍,补完这一系列的课程,再加一些相关的笔记,顺便推荐一本书《ABAQUS常见问题解答》。
在正式写笔记之前,先补一下参数单元的知识:
参数单元就是长得不规则的单元,因为真实物理性状复杂,不可能每个都长得四四方方。对于不同的参数单元,希望从规则单元通过变换来得到参数单元,以2D问题为例,首先引入两个坐标系,物理系



由此可见,需要变换的有:
<1>坐标;<2>偏导数;<3>积分变量(面积微元);
下面首先来说<1>坐标的映射:
学过斜角直线坐标的张量分析,就应该对坐标变换非常熟悉了,现在空间中有一个位置P,可以用一个向量P来表示,这个向量在不同的坐标系中有不同的坐标,即:

并且分量之间一定存在唯一确定的转换关系:


首先,这些都是理论上行的通的,然而,在这里我们不用精确的表达式算法,而用插值的方式来获得每一个基准系上的点在物理系中的坐标(以2D4Node为例):

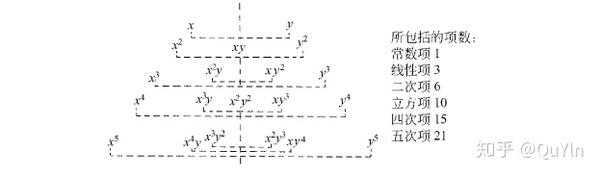
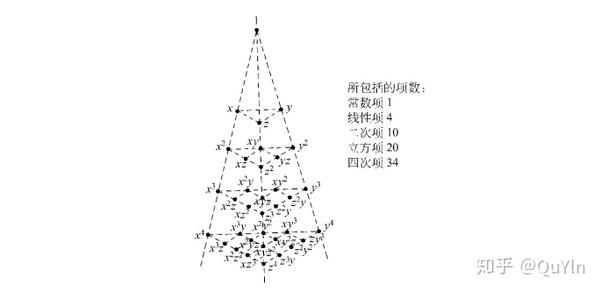
回忆一下形函数的构造,根据自由度数确定待定系数,插值函数从Pascal三角形中获得,这里是完全相同的道理,所以选取的坐标插值函数为:

接下来,通过四个节点处的八个坐标值来确定坐标插值函数中的待定系数:


其实仔细考察,便会发现,这和2D4Node的形函数是完全一致的,只不过一个是通过节点位移插值出位移场,一个是在坐标变换中通过节点坐标插值出整个场的坐标。
最后关于坐标变换,给出整个场的变换表达式:

关于<2>的偏导数变换,相信学过高等数学的人都会,引入雅各比矩阵,直接上图不费话了:

最后是<3>积分变量的变换,或者说面积微元的变换,这里需要用到一些行列式和外积的几何性质,以及微分几何的一点内容:
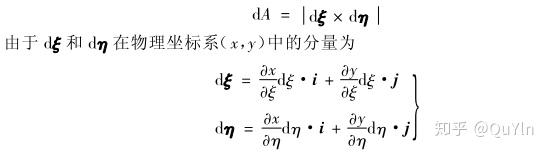
第一个表达式,可以从几何意义入手,叉乘的大小代表平行四边形的面积,这个不是绝对值,也不是行列式,是给一个向量取模。那么具体应该如何实施呢,通过将两个向量表达成以i和j为基地的空间中,再进行外积,我写一下我的理解,从几何角度分析的(如果不对请指正):





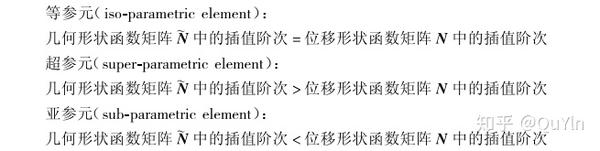
到这里,三个代换就做完了,这里在第一个坐标变换中引入了坐标的插值,根据坐标的插值和位移的插值的相对大小,参数单元分为:
下次的补充内容再说高斯积分,下面是正式的课程记录笔记。
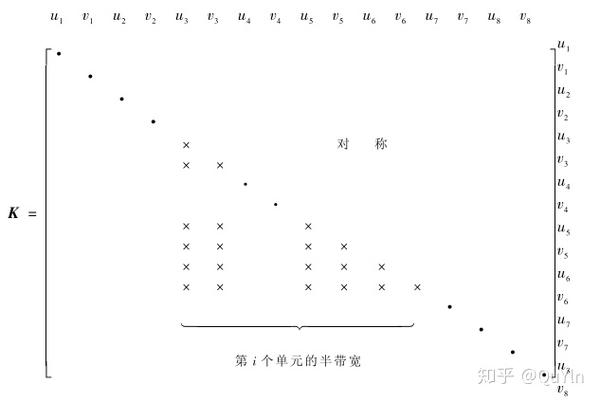
(1)先说第十章的前三节,和文章题目关系不大,简单做一下笔记。分别是讲了带宽(见下图),形函数与刚度矩阵的性质,边界条件的处理,研究总体刚度矩阵的带宽是为了节省计算机的存储空间的,我目前并不怎么关系怎么存储;边界条件的处理,是讲除了我们在矩阵位移法里面对于零边界划掉行列以外,为了保持原有刚度矩阵各行各列的编号,采用了一些利于计算机编程的处理思路,比如置一法,乘大数法,罚函数法,并且他们可以处理非零边界,这个在有限元软件上是已经实现过的,我目前不自己编程,也不怎么需要了解;另外的就是刚度矩阵的性质,其实考试前早都背过了,再写一写,先说单元刚度矩阵,性质有一下几条:Kii代表在i处产生单位一的位移时,在i节点所施加的力的大小;Kij(非对角线元素)表示在j处产生单位一的位移,在i处所施加的力的大小;害怕第二条记混淆吧,没关系,第三条告诉我们们Kij=Kji,即刚度矩阵是对称阵;然而这个矩阵也是奇异的,从求解刚度矩阵前需要带入边界条件就可以得知,刚度矩阵这个平衡方程是允许产生刚体位移的;既然允许产生刚体位移,这个矩阵就不能是正定的,因为产生的如果是刚体位移,其应变能应该依然为零,可见,刚度矩阵具有半正定的特征;最后回到刚度矩阵的由来,推导它通过的是最小势能原理,最小是能原理是平衡方程在变分条件下转化而来的,刚度矩阵因此具有平衡的特性,在每一行对刚度矩阵的元素求和,结果均为零,也不难通过这个性质得到它的行列式为零,又反推出奇异性。另外还有形函数的性质:Ni的含义是i处产生单位一的位移,其他位置不产生位移时整个的位移场;对Ni进行求和,结果为常数一,感觉像是权函数对吧,实际上是通过带入刚体位移得到的这个性质。
(2)第四节重点来了,关于收敛性性讨论。收敛的意思是指"单元的尺寸趋向于0时,FEM所给出的解趋向于真实解,不仅要讨论单元内部,还要讨论单元与单元之间",另一方面,我们应该尽量使得结果单调收敛。
思路很明确,我们从收敛这个结果,一步一步的推出它的必要条件,第一个是单元尺寸趋向于零时,势能的表达式依然存在,首先对势能的表达式进行展开:


位移函数必须连续,当体积趋向于零时,省略的高阶部分都趋向于零,为了使得势能存在,应该存在常应变项与常位移项,另外,位移函数在单元之间保持连续,才能保证应变的存在。
然后就有两个收敛准则要给出来:
<1>完备性要求:如果在势能泛函中所出现位移函数的最高阶导数为m阶,则单元内部位移场函数应该为m阶完备的多项式;
<2>协调性要求:如果在势能泛函中所出现位移函数的最高阶导数为m阶,则单元边界位移场应该具有m-1阶连续导数;
其实,之前在我们确定位移模式的时候已经默认了这些要求,只不过没有具体的提出来,现在给出位移模式中函数的选取规则:
<1>唯一确定性原则:节点的自由度个数等于待定系数个数,从低阶到高阶进行选取,选取完备的多项式提高精度(参考帕斯卡三角形);
<2>单元内部的完备性:包含常数项(常位移)和完备的一次项(常应变);
<3>单元之间的协调性:对于
(3)第五节, 第六节,关于

(4)第十章后面几节课得到的结论:
<1>FEM算出的位移整体上偏小;
<2>控制误差的h方法和p方法,h方法即增大网格密度,p方法即增加网格的多项式阶次;
后面讲的h和p方法我们可能每天都在使用,只是不确定它的名字。
总结一下,今天写了参数单元的变换原理,以及第十章的内容,关于有限元收敛性,精度和误差控制,想一下学懂真的很难,日后再仔细体会吧。下一次补上高斯积分和十一章的高阶单元。大神门多多指点我们初学者吧。
来源:知乎 www.zhihu.com
作者:QuYln
【知乎日报】千万用户的选择,做朋友圈里的新鲜事分享大牛。 点击下载
没有评论:
发表评论